Date: 25th of May 2013
Participating group members: Morten D. Bech and Thomas Winding
Activity duration: 5.5 hours
Goal
To further develop the behaviors of the autonomous robots and build one or more of them.
Plan
Modify the idle behavior of the robot so that it drives around randomly. Add the remaining behaviors and try to make them behave as we imagined they would.
Progress
We implemented the normal, or “idle”, behavior to have the robot move slowly around in a random manner. Its takeControl() method always returns a motivation value of 20 and should generally be the lowest value returned as this is the behavior we want it to have when nothing else is happening with the robot. The action() method of the robot can be seen below.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | public void action() { suppressed = false; int action = random.nextInt(2)+1; if (action == 1) { int direction = Math.random() > 0.5 ? -1 : 1; AutAnimal.pilot.travel(direction*(random.nextInt(20)+5), true); } if (action == 2) { int turn = Math.random() > 0.5 ? -1 : 1; int angle = 10 + random.nextInt(40); AutAnimal.pilot.rotate(turn * angle, true); } while (!suppressed && AutAnimal.pilot.isMoving()) { Thread.yield(); } AutAnimal.pilot.stop(); } |
Subsequently we added the remaining behavior classes and started implementing their functionality. The behavior that avoids other autonomous robots and the edges of the arena was fairly straightforward as the functionality was much akin to avoiding the player robot however it did not need to move as quickly since it is not “scared” of the other robots.
As we have not decided quite yet what should actually happen when the robot is hit by the player robot, it has been set to spin in place for three seconds when it is hit.
The hunger behavior of the robot is still not quite finalized as well. So far we imagine the hunger behavior will function as follows: The hunger of the robot increases over time, when the robot reaches some level of hunger it will start moving at a medium speed and move forward, still avoiding obstacles and the player robot. When it finds some food it will grab it with its “arms” and try to run away with it.
The way the robot will identify food is with a color sensor mounted on front of the robot and pointing downwards, the “food” will be a block of some sort with a green base that extends out from the block itself, enabling the robot to see it.

The extended base of the food enables the robot to detect it with the color sensor
“Artists” rendition of the food block
Building of the autonomous robot
The robot needs to have three sensors in front, namely the IR Sensor, Ultra Sonic Sensor and Color Sensor. Furthermore it should have a grabbing arm for grabbing the food as described above. The robot also needs some kind of pressure plate on top to detect when it’s been hit by the player. To make hitting this plate easier we will try to keep the profile of the robot as low as possible.
In the robots first incarnation the Ultra Sonic and IR Sensors were placed in front of the Color Sensor, but this gave us a problem with the grabbing arm which would have to be very long if we wanted to move it into a upright position. Therefore this design was abandoned and the two sensors were placed on top of the Color Sensor instead. The Ultra Sonic Sensor was placed as the topmost sensor and we angled it slightly downwards so it could detect the edge of the arena. Right behind the Ultra Sonic Sensor the pressure plate is placed which is connected to a Touch Sensor.
Due to our construction of the robot it is relatively hard to get to push the buttons on the NXT and connecting the cables to the sensors and NXT is going to be a tight fit as well, we have not mounted them yet. A solution to not being able to press the buttons could be to have the program on the NXT autorun when it is turned on and then use the pressure plate on top of the robot as a start button. Pictured below is our construction of the robot.
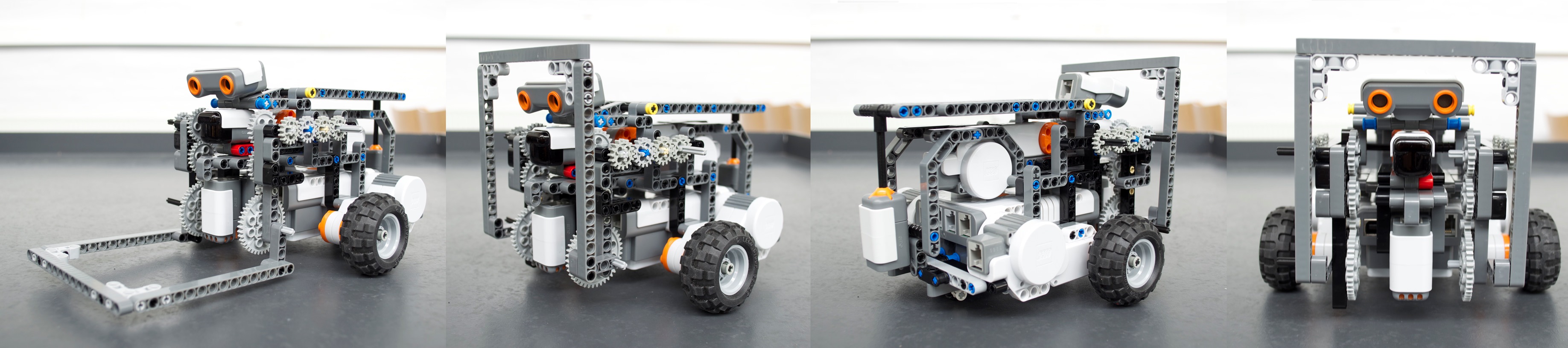
Pictures of the autonomous robot for the game, completed with all the necessary sensor and motors.